Vigésima novena versión

Director
Héctor Fabio Cadavid Rengifo
Estudiantes
ALVAREZ SALAMANCA GUILLERMO LEON
MARTINEZ MUÑOZ JUAN CARLOS
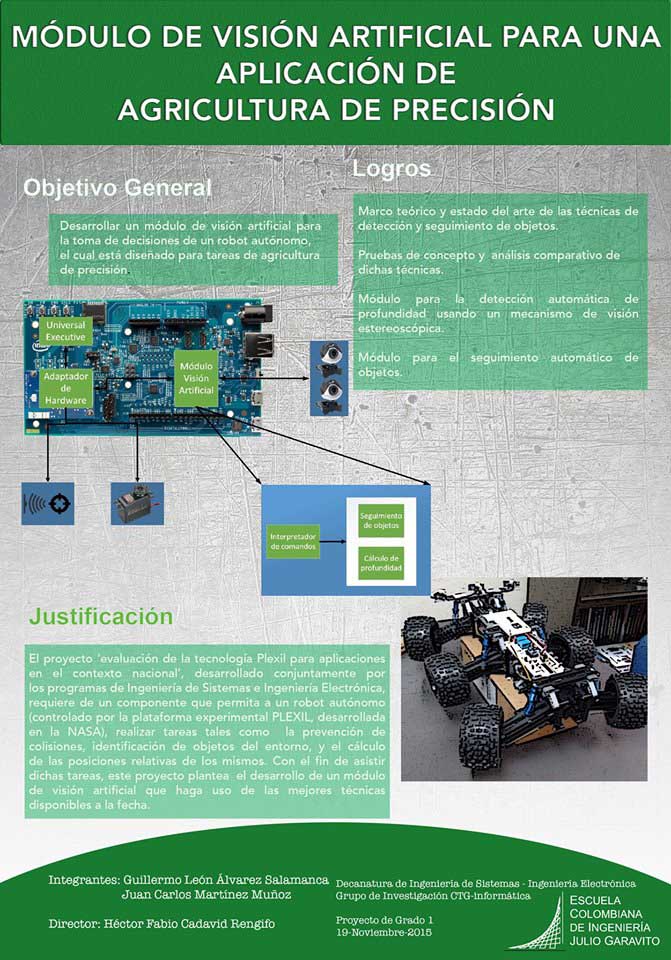
Módulo de visión artificial para una aplicación de agricultura de precisión
Alias: VISIONMOD
Categoría: PGR2
Línea de investigación: Informática & Fundamentos
Objetivo general: Desarrollar un módulo de visión artificial para la toma de decisiones de un robot autónomo, el cual está diseñado para tareas de agricultura de precisión.
Objetivos específicos:
- Modularización de la implementación de los algoritmos de detección de objetos y estimación de distancias.
- Implementación de comunicación entre procesos mediante memoria compartida.
- Pruebas de campo para detección de objetos usando ORB y color.
- Pruebas de campo para estimación de distancias usando un objeto conocido y un enfoque estereoscópico.
Logros:
Comunicación entre procesos utilizando IPC con memoria compartida.
-
Integración de los módulos de detección de objetos y estimación de distancias.
-
Pruebas de campo y análisis de resultados.